As I write this post it’s Halloween in the UK. I run a Code Club at a local school, and today is club day. So why not combine the two with some digital pumpkin carving!

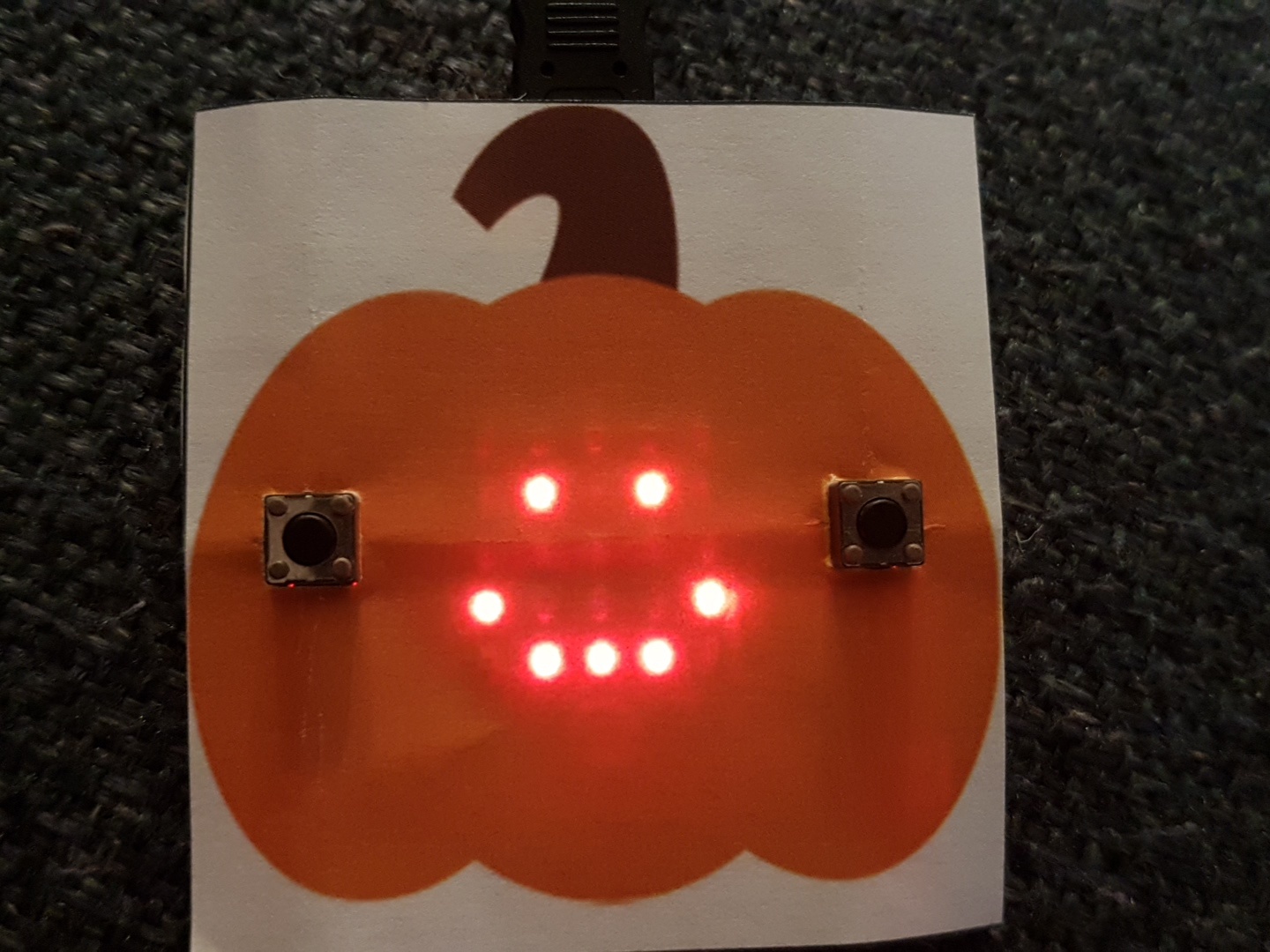
All you need is to print out a pumpkin shape to the size of a Microbit on some standard printer paper. The LEDs are bright enough to shine through to display whatever pattern or shape you make.
The code can be as simple or as adventurous as you like. Use the “show icon” block for one of the predefined shapes. Use “show LEDs” to make your own. Attach different shapes to different actions, or even animate it.
Here’s the Word Template I created. The original pumpkin clipart is from TechFlourish.com and to the best of my knowledge is free for personal use.